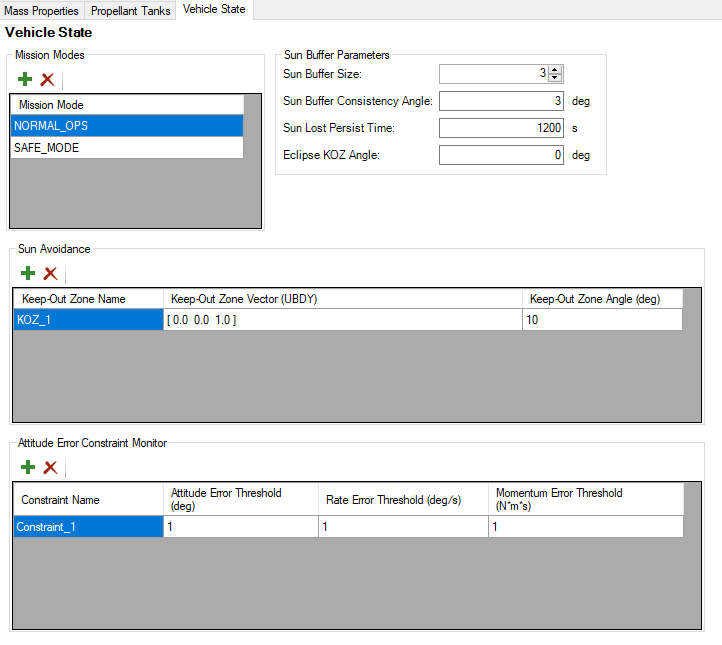
Vehicle State
Use the Vehicle State tab to define mission modes, sun buffer, avoidance, and attitude error constraints.
Mission Modes
You can add or delete Mission Modes from this part of the Vehicle State tab. Mission modes are simply a way to build states in the system that can be used to trigger events and sequences via the Telemetry Monitor and the Sequence Editor.
For example, you could create a sequence that changes the mission mode to LOW_POWER_MODE and then commands the satellite to point at the Sun. Then, you can set up a telemetry monitor that will trigger the sequence to change the mission mode if the battery state of charge goes below a safe value.
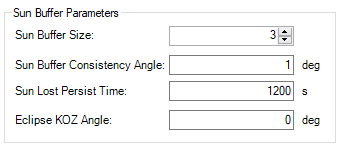
Sun Buffer Parameters
The Sun Buffer is a place to store and hold a sun vector estimate from sun sensors. When sun sensor measurements exist, these measurements are placed into the buffer and checked for consistency. They then provide a valid estimate of the sun direction to the rest of the system. In the event that sun measurements are not present and the buffer is not valid (inconsistent or expired), the sun vector can be determined from the ephemeris. If ephemeris is also not present, the system has no knowledge of the sun direction. Typically the SunAcq mode is used to search for the sun.
| Parameter | Description |
|---|---|
| Sun Buffer Size | Choose values between 0 and 10. The Sun Buffer will use that number of previous sun measurements and compare them to the current measurement to ensure they are consistent. If they are, the measurements are valid and will be used to compute a sun vector. If not, the Sun Buffer will use attitude and ephemeris data instead. All buffer measurements are stored in the Inertial Frame. |
| Sun Buffer Consistency Angle | The angle between sun measurement and previous estimates must be within this angle to be considered valid. |
| Sun Lost Persist Time | Specify the time required without sun measurements before clearing the sun buffer. |
| Eclipse KOZ Angle | This is the angle between sun and central body limb at which the Keep-Out Zone (KOZ) becomes active. It is only valid if KOZs are enabled. For example, if the KOZ angle is -5 degrees, then the spacecraft will continue to avoid the KOZ until the Sun has gone 5 degrees past eclipse. |
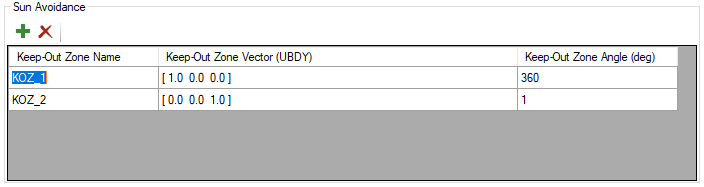
Sun Avoidance
This interface defines body vectors that are not to be pointed at the sun. These avoidance vectors are typically used for imaging equipment on the satellite that are sensitive to sun pointing. A Keep-Out Zone (KOZ) violation can be observed within the Sun Avoidance telemetry from the FSW_VehicleState packet.
FSW_VehicleState telemetry.
| Parameter | Description | Units |
|---|---|---|
| Keep-Out Zone Name | Enter a name for a particular keep-out zone. | N/A |
| Keep-Out Zone Vector | Define a 3x1 unit vector in the body frame to avoid pointing at the sun. | UBDY |
| Keep-Out Zone Angle | Specify the angle around the KOZ vector for sun avoidance. | deg |
Attitude Error Constraint Monitor
The attitude constraints object enables you to configure as many attitude constraint checks as desired. When you create an attitude constraint, SOLIS creates a telemetry flag that indicates whether or not the parameters associated with that constraint are met. That flag is available in telemetry and can also be used on board via the Telemetry Monitor. A typical use-case for this feature is to ensure certain constraints are met before performing tasks such as imaging or thrusting.
| Parameter | Description | Units |
|---|---|---|
| Constraint Name | Name a particular attitude error constraint | N/A |
| Attitude Error Threshold | Define a maximum attitude error for this constraint | deg |
| Rate Error Threshold | Define a maximum rate error for this constraint | deg/s |
| Momentum Error Threshold | Define a maximum momentum error for this constraint | N*m*s |